
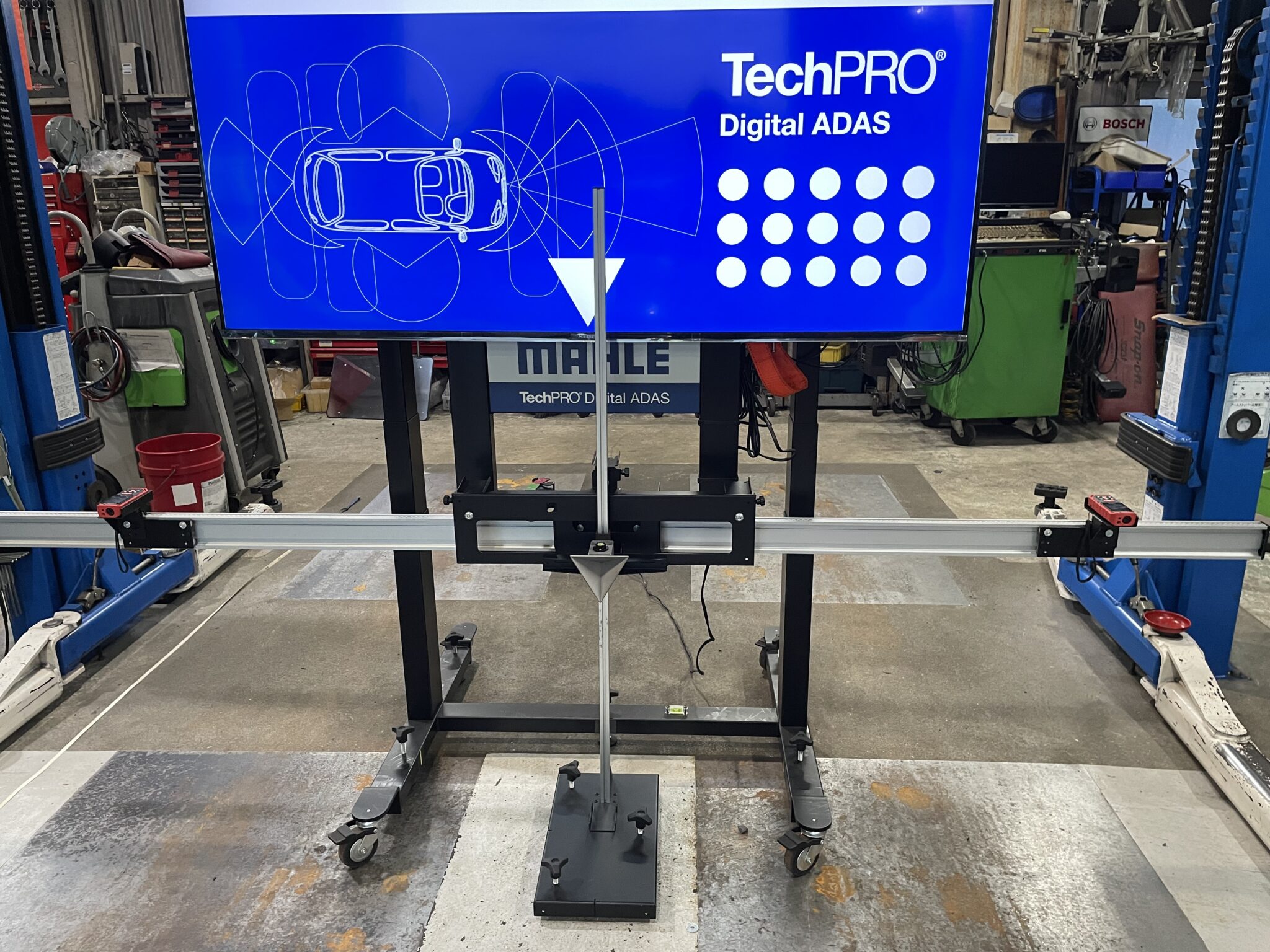
3台続けてADAS(先進運転支援システム)調整作業
プジョー5008とルノーtwingoⅢは共に法廷点検と併せて4輪アライメント調整のご依頼を頂いております。両車はADAS(先進運転支援システム)が装備された車両の為、リヤのスラストアングルの変更により車両中心線が変化したため、先進運転支援システムのカメラやレレーダーの調整を行います。



プジョー5008のカメラの調整はスタティック(静的)での調整と実走行を行いながらのダイナミック(動的)での2方法を行います。
5008はカメラの調整作業が終わり、バンパーセンター下側装着のレーダーの調整も行います。ダイナミック(動的)での調整となりますが、直線道路での一定速度での走行が必要になる為、日が暮れて道路が空いたころに行います。
2台目のtwingoの作業を開始します。このtwingoⅢについては、車高調整式サスペションにて35mmほど車高が低く、規定のカメラ位置を35mm低く設定します。
車高変化の有る車両はこの設定が肝となる所です。



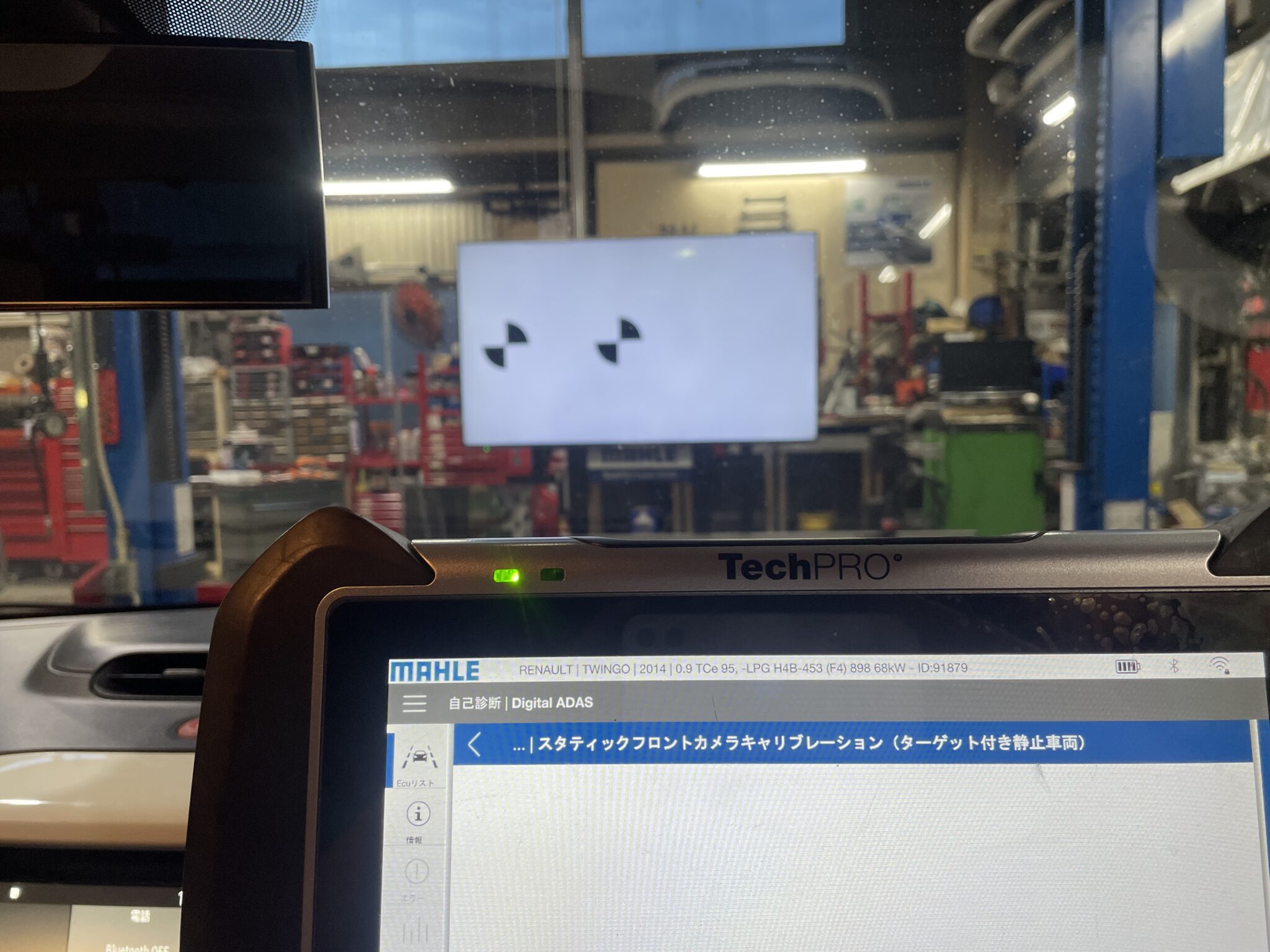

twingoはスタティック(静的)での調整のみ可能です。
本日3台目の車両は弊者社用車ディーゼルエンジンのマツダ DEMIOです。フロント廻りをアクシデントにて鈑金修理を施し、フロント外装廻りの分解を行った為、バンパー内のレーダーの調整を行います。不慣れな国産車ですが、MAHLEの診断機の指示に従い機材の設定を行いレーダー調整を行います。


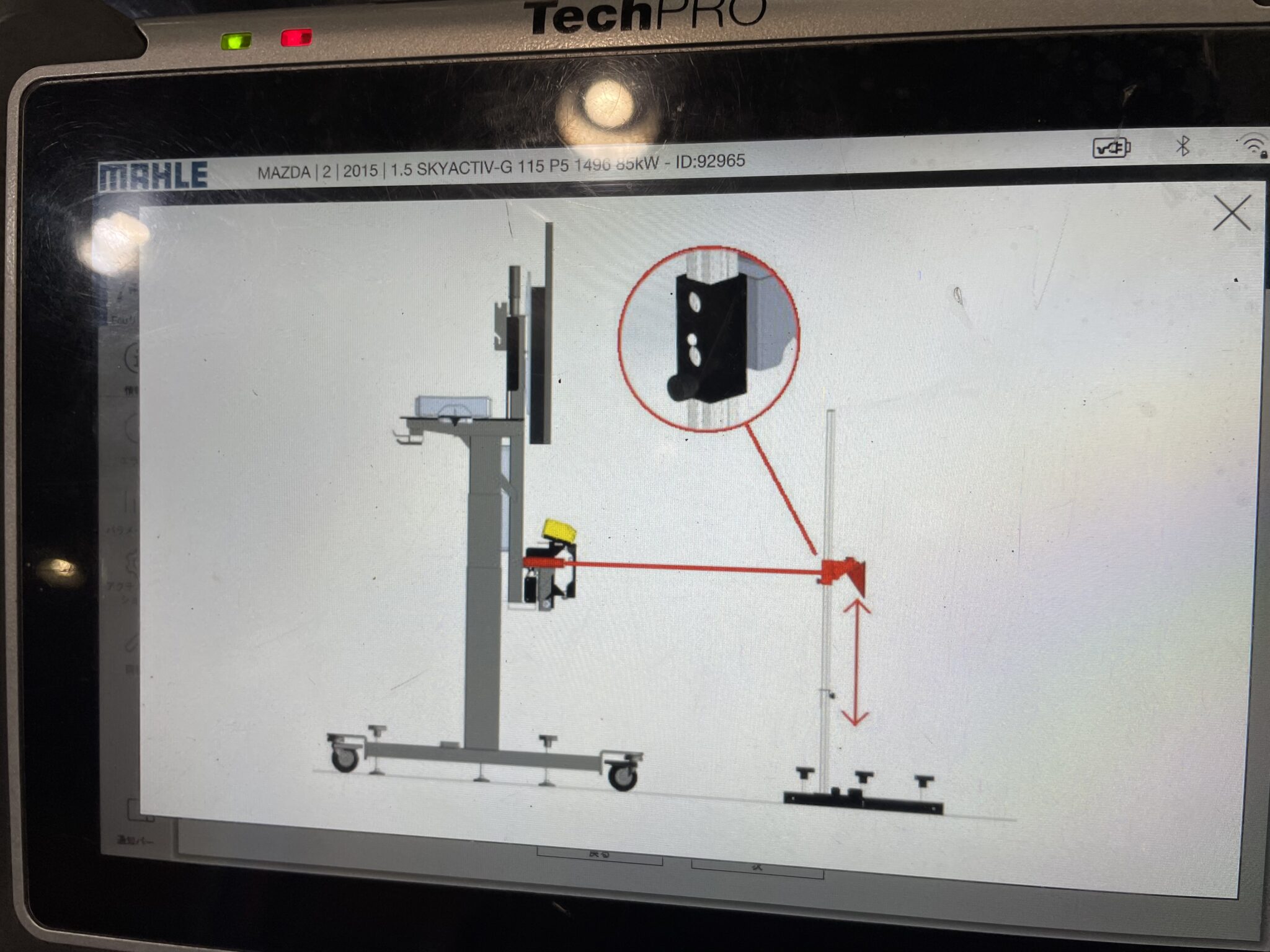
DEMIOのレーダー調整には全長10m以上スペースが必要な為、他の作業を中断してのスペース確保が必要でした。
続いて日が暮れプジョー5008のレーダーの調整に出かけます。夜の直線の長いバイパスをカングーを前方向走らせターゲットにします。診断機の指示に合わせて追従運転を診断機の指示に従い走行します。条件が揃えば、20キロほど走行して作業が完了です。先行車との車間調整が難しく大変気を使う実走行作業です。

関連記事

 ABARTH695サベルトシート位置変更
ABARTH695サベルトシート位置変更 国内販売が間もないABARTH695esseesseが入庫しております。右ハンドル車・左ハンドル車...
 売約済み ランチアイプシロンのリフレッシュメンテナンス(中古車整備)スタートです。
売約済み ランチアイプシロンのリフレッシュメンテナンス(中古車整備)スタートです。 当社のサイトにて告知していました USED CAR...
 限定!REDUCER-BLACK カッコイイ!
限定!REDUCER-BLACK カッコイイ! 見慣れているはずのレデューサが、すごく新鮮&斬新 に見えます! ...
 週末営業の終了です
週末営業の終了です 本日の週末営業が間もなく終了します。 本日も沢山のお客様にご来店頂き、ありがとうございました...
 ターボ制御パーツのトラブル事例
ターボ制御パーツのトラブル事例
プジョー208GTIターボエンジンは、その性能を維持してこそ、楽しさが光る乗り物である。 この所、立て続けに...
 ルーテシアの定番作業
ルーテシアの定番作業
シフトコントロールボックスの修理毎度の作業ですが、今回の施工車両は樹脂パーツの移動量と頻度が多かったので動画も交えてご紹介しま...
 695RIVALEのサスペンション、準備が整いました!
695RIVALEのサスペンション、準備が整いました!
エナペタルさんのキャンペーンに間に合いましたというわけで出来上がって来ました。RIVALEのお客様に向けたサスペンションキットが。 ダン...
 90’Sの格好良さ健在です
90’Sの格好良さ健在です ドッカ~ンと前開きボンネットがカッコイイ、元祖クリオです。ルノスポールのここから始まったクリオ...
 アバルト・サスペンションカスタマイズ
アバルト・サスペンションカスタマイズ アバルト500は、サスペンション関連作業の施工にてお預かりをさせて頂いています。 今回の...
 アバルト500 サスペンションの改善・手直し・味付け修正
アバルト500 サスペンションの改善・手直し・味付け修正
吊るし製品について考えるアバルト500は、様々なメンテナンスの内容でお預かりをさせて頂いています。 ご新規様のお車で...
 シトロエンC4は車検とあわせて基本メンテナンス
シトロエンC4は車検とあわせて基本メンテナンス 事前に初診点検を行わせて頂いたシトロエンC4はあらためて車検整備でお預かりです。 ...
 リヤスイングアームの点検より開始します
リヤスイングアームの点検より開始します
プジョー106リフレッシュメンテナンス先にスチーム洗浄作業を終えていた106s16は、お客様との受け入れ時ご相談事項にあった、後部サ...